I am teaching courses in the areas of robotics, interaction design, and machine learning.
Human-Computer Interaction (CSAI, Tilburg University)
Fall 2022, Fall 2023, Fall 2024, Fall 2025
 This course will explore the fundamental principles governing the interaction between humans and computers. Throughout this course, we will delve into the theoretical and practical aspects of HCI.
The theoretical portion of the course will cover essential concepts such as affordances, usability, heuristics, and evaluation methods. We will discuss how these principles shape the design and development of interactive systems, enabling effective user experiences. In the practical segment, students will have the opportunity to design, develop, and deliver HCI projects in robotics, the Internet of Things (IoT), and virtual reality.
This course will explore the fundamental principles governing the interaction between humans and computers. Throughout this course, we will delve into the theoretical and practical aspects of HCI.
The theoretical portion of the course will cover essential concepts such as affordances, usability, heuristics, and evaluation methods. We will discuss how these principles shape the design and development of interactive systems, enabling effective user experiences. In the practical segment, students will have the opportunity to design, develop, and deliver HCI projects in robotics, the Internet of Things (IoT), and virtual reality.
Canvas link, Course page
Autonomous Systems (CSAI, Tilburg University)
Spring 2023, Spring 2024, Spring 2025
 This course presents the fundamental principles of autonomous systems, exploring cognitive/developmental and social robotics perspectives.
The course is structured into two main parts: theoretical and practical. In the theoretical section, we will introduce essential concepts such as multimodal integration, embodiment, control architectures, etc. In the practical section, students will have hands-on experience in building a simple autonomous hardware agent. Additionally, students will be able to develop a similar agent in a simulation environment, such as PyBullet or Gazebo. Through developing real and virtual autonomous agents, students make critical judgments and comparisons between two agent types.
This course presents the fundamental principles of autonomous systems, exploring cognitive/developmental and social robotics perspectives.
The course is structured into two main parts: theoretical and practical. In the theoretical section, we will introduce essential concepts such as multimodal integration, embodiment, control architectures, etc. In the practical section, students will have hands-on experience in building a simple autonomous hardware agent. Additionally, students will be able to develop a similar agent in a simulation environment, such as PyBullet or Gazebo. Through developing real and virtual autonomous agents, students make critical judgments and comparisons between two agent types.
Canvas link, Course page
Human-Robot Interaction (Informatik, Humboldt-Universität zu Berlin)
Summer 2021
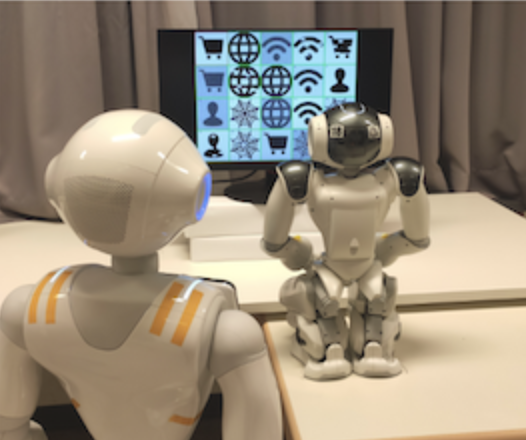
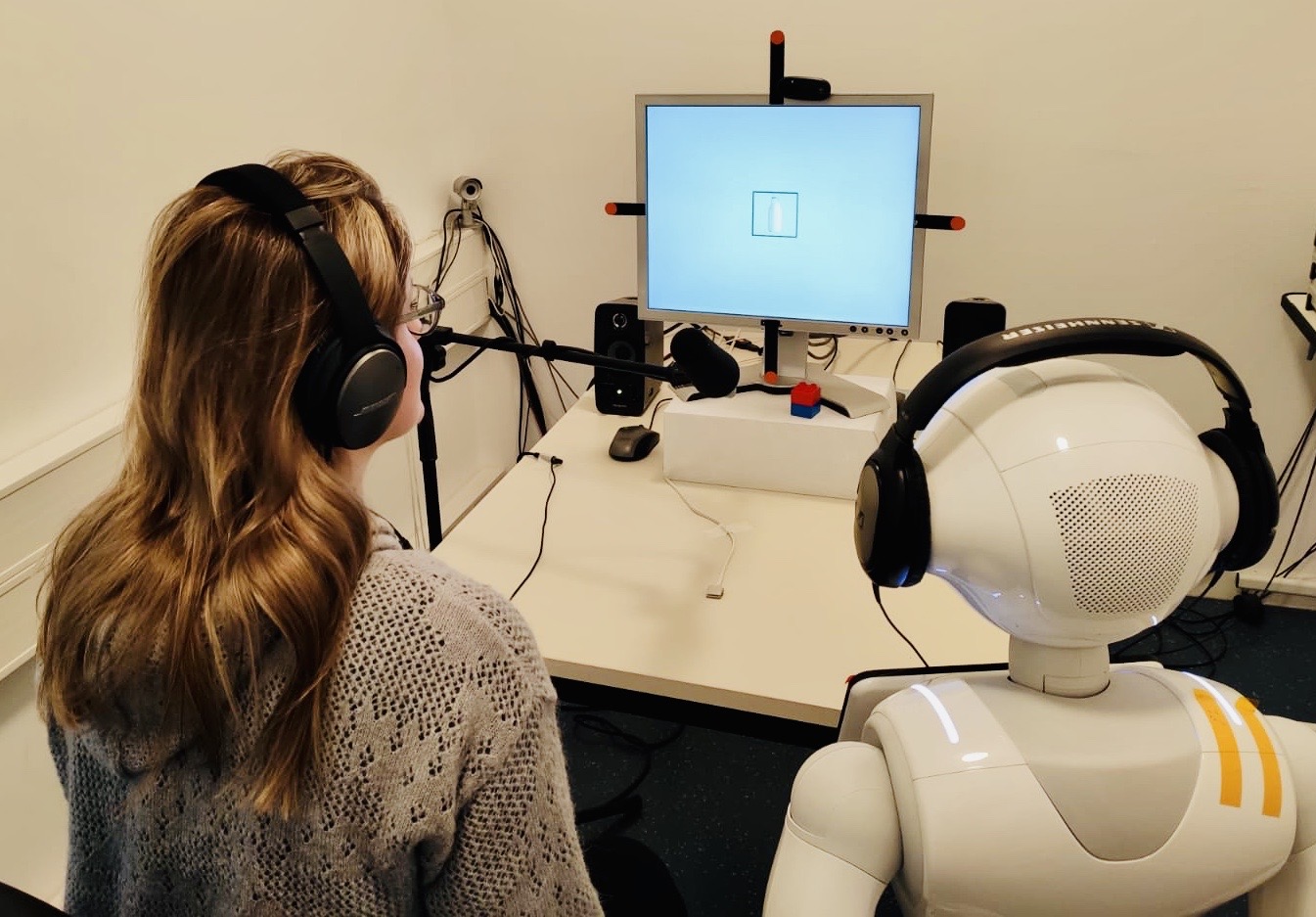 In this seminar, the current research studies on human-robot interaction (HRI) will be introduced. The course content involves both theoretical (such as embodiment, anthropomorphism, and emotions) and practical (e.g., HRI experiment design, robot types and sensors, and programming machine learning pipeline) aspects of human-robot interaction. We will particularly focus on interdisciplinary studies at the intersection of psychology, neuroscience, and robotics. Additionally, the Pepper humanoid and Nao robots will be available – depending on the Covid regulations in HU-Berlin– for designing and performing HRI experiments.
In this seminar, the current research studies on human-robot interaction (HRI) will be introduced. The course content involves both theoretical (such as embodiment, anthropomorphism, and emotions) and practical (e.g., HRI experiment design, robot types and sensors, and programming machine learning pipeline) aspects of human-robot interaction. We will particularly focus on interdisciplinary studies at the intersection of psychology, neuroscience, and robotics. Additionally, the Pepper humanoid and Nao robots will be available – depending on the Covid regulations in HU-Berlin– for designing and performing HRI experiments.
Moodle link, Course page
Machine Learning in Robotics (Informatik, Humboldt-Universität zu Berlin)
Winter 2020/2021
 In this seminar, current topics and methods of machine learning with application in robotics are discussed. In particular, we focus on new developments in deep learning applications – namely robot vision, cognitive-developmental tasks, and multimodal learning– in humanoid robotics. To pass this course, the students should develop machine learning models with robot datasets, propose team projects, presents results in oral presentations and written reports.
In this seminar, current topics and methods of machine learning with application in robotics are discussed. In particular, we focus on new developments in deep learning applications – namely robot vision, cognitive-developmental tasks, and multimodal learning– in humanoid robotics. To pass this course, the students should develop machine learning models with robot datasets, propose team projects, presents results in oral presentations and written reports.
Moodle link, Course page
Multimodal Machine Learning (Informatik, Humboldt-Universität zu Berlin)
Summer 2020
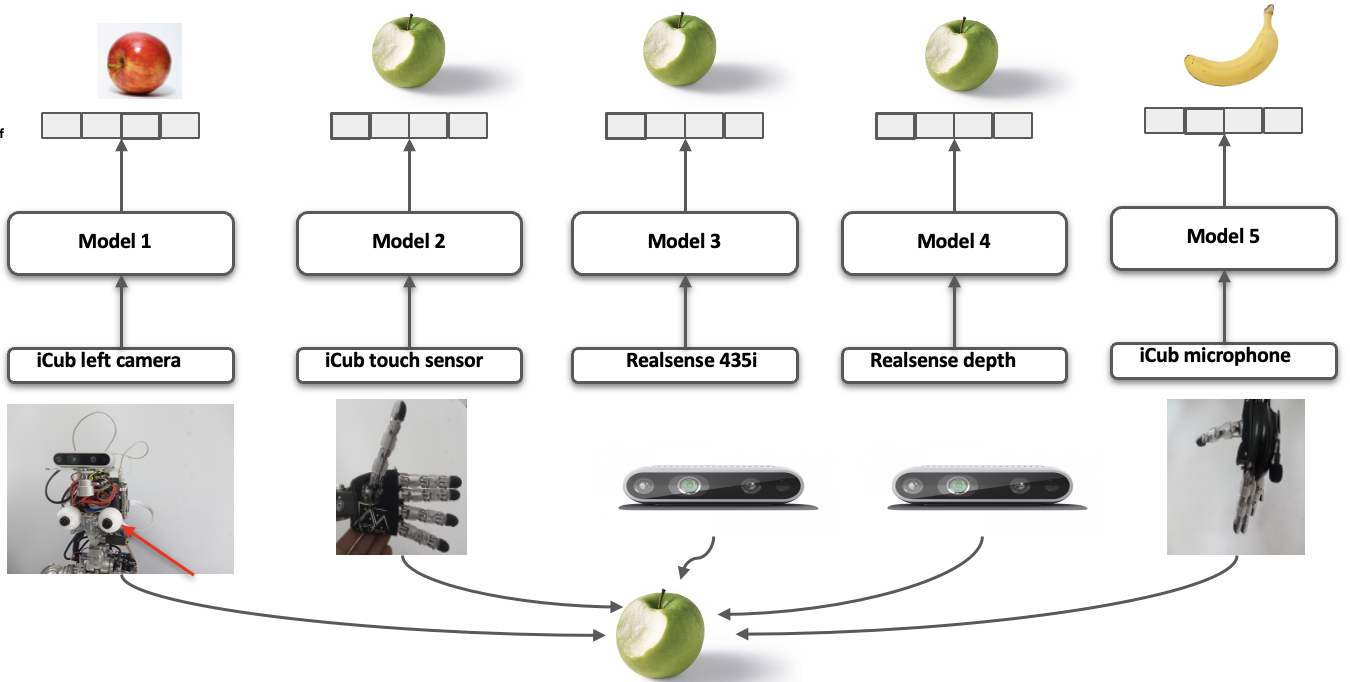 This seminar introduces the foundations of multimodal machine learning and applications on simulated and actual robot platforms. It covers the basics of machine learning, preliminary concepts of sensors (e.g., depth and color cameras, IMU, position encoders, etc.), multimodal sensor fusion techniques, specifications of robot platforms (e.g., Nao and the Pepper), and simulators. Students will work in teams on a topic in (deep) multimodal learning for robotics and present their experimental results in oral presentations and written reports.
This seminar introduces the foundations of multimodal machine learning and applications on simulated and actual robot platforms. It covers the basics of machine learning, preliminary concepts of sensors (e.g., depth and color cameras, IMU, position encoders, etc.), multimodal sensor fusion techniques, specifications of robot platforms (e.g., Nao and the Pepper), and simulators. Students will work in teams on a topic in (deep) multimodal learning for robotics and present their experimental results in oral presentations and written reports.
Canvas link, Course page